Space Elevator
Prototype 1
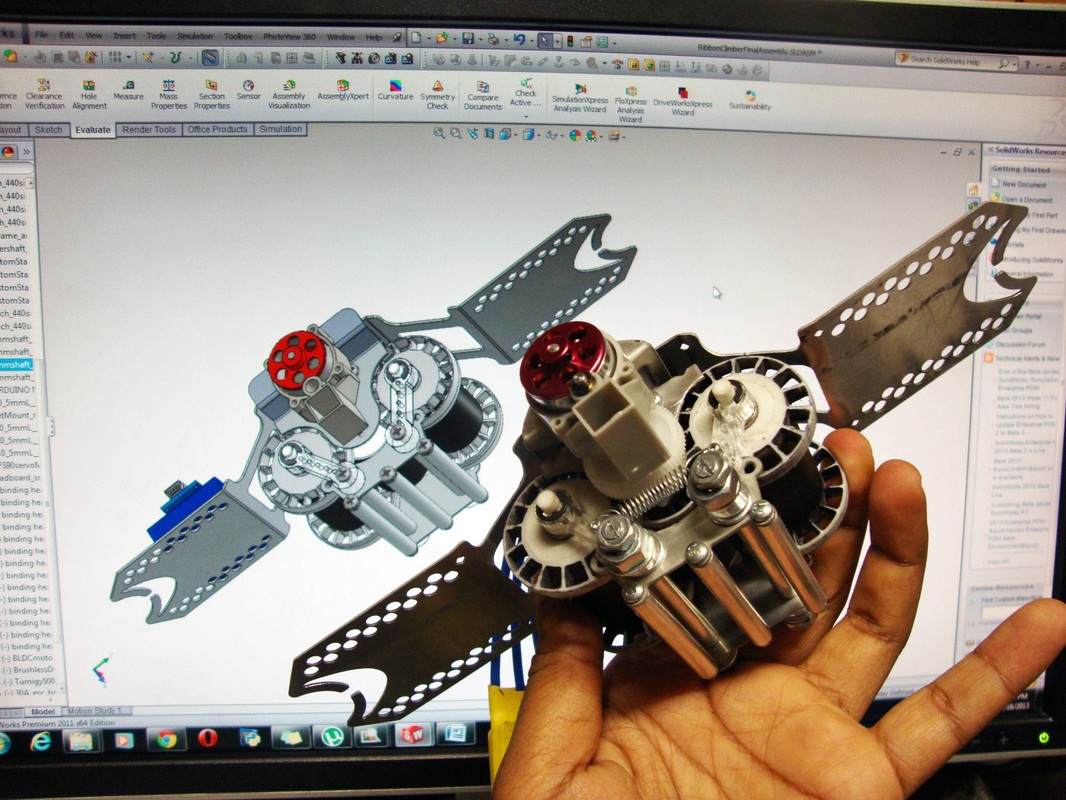
Fabrication
Chassis: Sheet metal work (AL 6061 alloy) Power & Guide wheels: 3D printed Linkage: Laser vector cut (Acrylic) Design Platform: SolidWorks Software Involved:
Solidworks Labview MS Excel Tools and Equipments Involved: OMAX Waterjet cutter KERN Laser cutter EOSINT P760 3D printer Lathe Shear/Brake |
Ever since objects could be launched into space, people around the world have attempted to enter earth's orbit and beyond for commercial and non-commercial reasons. Access to space has typically been through the usage of rockets; however, igniting a large canister full of highly explosive fuel and riding on its top is an inherently dangerous task. Failure of even the simplest component could lead to a monumental disaster. There hasn't been any significant change in this technology other than the composition of the rocket fuel and the engine performance. The basic limitations and risks remain intact while the need for access to space has been increasing exponentially. A safer and efficient mode of transportation is required to replace the rockets.
One of the widely discussed replacement solution to rockets is a Space Elevator. Until recently, it existed in the world of science fiction; however, recent technological advancements in the synthesis of high strength, low-density materials like Carbon Nanotubes (CNTs) are making this concept a promising solution. A space elevator is a system that climbs its way up into the orbit through a high-strength, low-density tether. The upper end of the tether is mounted to a satellite positioned in the Geostationary orbit. The satellite acts as a counter weight and the center of mass of the whole system shifts towards the satellite. The centrifugal force generated as the result creates the tension required for the movement of the elevator. As an engineer and a strong advocate of deep space exploration, I am conceptualizing efficient climber designs on my spare time. For the testing purposes of my scaled model, I use a "Red Flagging Tape" #17021 as the tether. The design is battery free and uses mono-crystalline solar cells to convert light energy to power its on-board micro-controller and powertrain. So far, I have fabricated two prototypes; prototype 2 was built from the lessons learnt from prototype 1 design. During the design and fabrication phases, extra care needed to be taken to make sure the center of mass is at the geometrical center of the device and it stay flush with the tether to balance the climber. Considering the improved relative payload capacity and energy efficient power generation, prototype 2 is expected to make its debut in the Robogames 2013. I firmly believe one day humanity will implement such a permanent umbilical cord into the heavens for daily access! Funded, Designed, and Fabricated: Augustine Aelevanthara CAD Platform: Solidworks 2010 |
